
Odometría: La guía completa para entender su funcionamiento
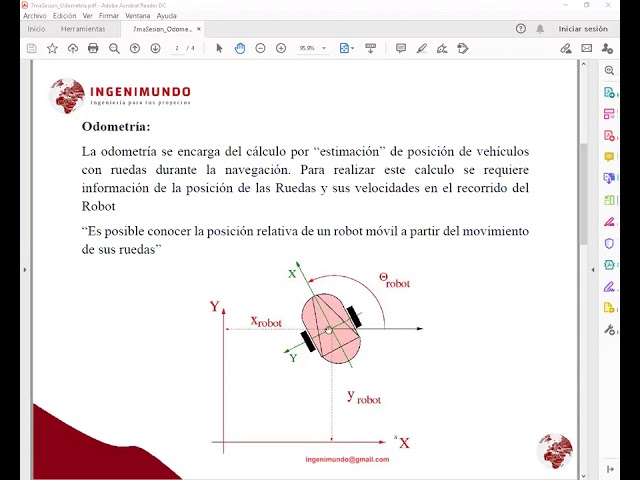
La odometría es un concepto fundamental en robótica y sistemas de navegación que permite a los robots determinar su posición y orientación en el espacio. Consiste en un método de estimación de la posición basado en la medición de los movimientos realizados, generalmente mediante sensores de movimiento como los codificadores de las ruedas. Imagina un robot que se desplaza por un terreno complejo; la odometría le permite «recordar» cada movimiento que ha realizado para construir un mapa mental de su posición actual en relación a su punto de partida.
La odometría se basa en el principio de la integración de la velocidad. En otras palabras, al medir la velocidad y la dirección del movimiento durante un periodo de tiempo, se puede calcular la distancia recorrida y, por lo tanto, la posición actual del robot.
Fundamentos de la odometría
La odometría se basa en la medición de la distancia recorrida por las ruedas del robot. Esto se logra mediante codificadores que se instalan en los ejes de las ruedas y cuentan las rotaciones. Cada rotación se traduce en una distancia específica, dependiendo del diámetro de la rueda. El uso de estos codificadores es fundamental en la odometría, ya que proporcionan una medida precisa de la distancia recorrida por el robot.
Cómo funciona la odometría
Para entender cómo funciona la odometría, imaginemos un robot con dos ruedas. Cada rueda tiene un codificador que cuenta las rotaciones. El robot se mueve hacia adelante y las ruedas giran. Al contar las rotaciones de las ruedas y conocer el diámetro de las mismas, se puede calcular la distancia recorrida por cada rueda.
El cálculo de la distancia se realiza a través de la siguiente fórmula:
Distancia = Rotación de la rueda * Diámetro de la rueda * π
Donde π es una constante matemática que representa la relación entre la circunferencia de un círculo y su diámetro.
Con la distancia recorrida por cada rueda, se puede calcular el desplazamiento del robot en el plano horizontal. La dirección del desplazamiento se determina por el ángulo de giro de las ruedas.
Limitaciones de la odometría
A pesar de su utilidad, la odometría presenta algunas limitaciones inherentes:
- Acumulación de errores: La odometría es susceptible a la acumulación de errores debido a la imprecisión en la medición de la distancia recorrida por cada rueda. Estos errores se pueden generar por varios factores, como la pérdida de contacto entre la rueda y el suelo, el desgaste de las ruedas o la diferencia en el tamaño de las ruedas.
- Problemas con el conteo de pulsos: Los codificadores pueden perder o contar erróneamente los pulsos debido a vibraciones o condiciones de funcionamiento adversas. Esto puede generar errores en la medición de la distancia recorrida por el robot.
- Lentitud en el procesamiento: El procesamiento de la información de los codificadores y el cálculo de la posición del robot puede ser lento, especialmente si se trata de robots con alta velocidad de movimiento.
Estrategias para mejorar la precisión
Para mejorar la precisión de la odometría, se han desarrollado diferentes estrategias:
- Arquitectura de sincronización de la transmisión: Esta estrategia utiliza un mecanismo de sincronización para asegurar que ambas ruedas giran al mismo tiempo y con la misma velocidad. Esto reduce la posibilidad de errores en la medición de la distancia recorrida por el robot.
- Ruedas delgadas e incompresibles: Utilizar ruedas delgadas e incompresibles reduce la posibilidad de deslizamiento y mejora la precisión de la medición de la distancia recorrida.
- Reducción de la influencia de las ruedas de apoyo: Las ruedas de apoyo pueden introducir errores en la medición de la distancia recorrida por el robot.
- Integración con otros sensores: La odometría se puede combinar con otros sensores, como los sistemas de visión artificial o los sensores de velocidad, para obtener una mejor estimación de la posición del robot.
Aplicaciones de la odometría
La odometría se utiliza en una amplia gama de aplicaciones, incluyendo:
- Robótica móvil: Los robots móviles, como los robots de limpieza o los robots de entrega, utilizan la odometría para navegar por su entorno.
- Vehículos autónomos: Los vehículos autónomos utilizan la odometría para determinar su posición y orientación en la carretera.
- Trenes: Los trenes utilizan la odometría para determinar su posición y velocidad, lo que es fundamental para el control de la velocidad y la seguridad del tren.
- Sistemas de posicionamiento indoor: Los sistemas de posicionamiento indoor utilizan la odometría para determinar la posición de los usuarios en interiores, como en centros comerciales o hospitales.
Conclusión
La odometría es un método eficaz y ampliamente utilizado para la estimación de la posición de los robots y otros sistemas móviles. Aunque presenta algunas limitaciones, la odometría se puede mejorar mediante el uso de estrategias específicas y la combinación con otros sensores.
La precisión de la odometría es crucial para el funcionamiento de una gran variedad de sistemas, desde robots móviles hasta vehículos autónomos. Su comprensión y aplicación son esenciales para el desarrollo de sistemas robóticos avanzados que puedan navegar de forma segura y eficiente en entornos complejos.